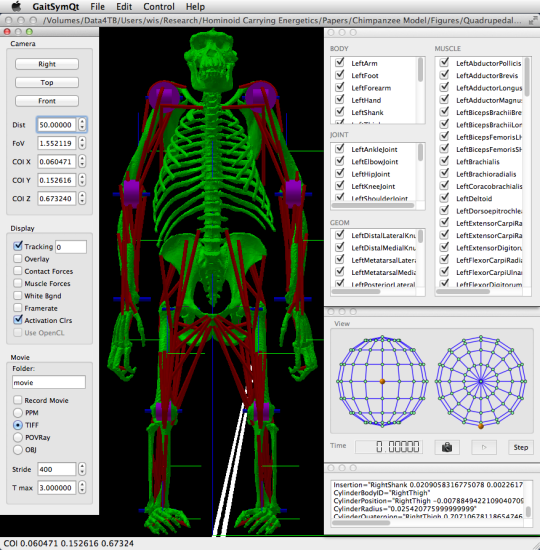
GaitSym היא תכנית מודלים דינמית קדימה. המשמעות של זה הוא שאתה מציין את הכוחות ואת התכנית משתמשת בחוקים של ניוטון כדי לחשב את התנועות. אתה יכול להוריד אותו מכאן כולל מגוון רחב של מודלים אנושיים והלא אנושי 2D and 3D כדי להתחיל. הוא משתמש במנוע פיזיקת מנוע להרחיב Dynamics לעשות את רוב העבודה הקשה ומספק מערכת פורמט קובץ ותצוגה כך שהמשתמש לא צריך לעשות שום תכנות. הוא גם מספק מודלים שרירים שונים, כך שניתן להפיק הכוחות ישירות מרמות הפעלת שרירים ומספר הקרסים כדי לאפשר לו להיות בשימוש עם כלים לאופטימיזציה גלובליים כגון אלגוריתמים גנטיים. התכונות העיקריות שלו הן: מהיר, גמיש וחזק קדימה דינמי דגמן; מערכת לתקשר מתוחכמת; Minetti-אלכסנדר וUmberger-Gerritsen-מרטין דוגמניות שריר להערכת עלות Metabolic; באמצעות נקודות וגלישת צילינדר לנתיבי שריר; טנסור אינרציה מחושב ממתאר המשולש Mesh; עולם או מקומי לתאם מערכות ליצירת מודל יעילה. קוד מקור מלא כלל (C ++ הידור על MacOSX, Windows, Linux ומערכות יוניקס אחרים); שלם עם מגוון הרחב של דגמי אדם ו2D ללא אדם ו3D; מייצר סטילס באיכות גבוהה ואנימציות באמצעות חיצוני Ray-מעקב
מה חדש במהדורה זו:.
גרסה 2013:
- מחוון חדש משותף;
- מודל שריר חדש כוללים גיד דעיכת, קינטיקה הפעלה, תגובת האביב שאינו ליניארי, ויציבות מספרית טובה יותר;
- מכונית תיבת נהגים חדשים;
- GEOM התיבה החדש;
- רצועת שרירים חדשה שיכול לעטוף את סיבוב שני צילינדרים מקבילים;
- הדמיה ענן נקודה ישירה;
- בטל במומנטי גבול משותפים ציר מוגזם, או על סף יעד נתונים;
- עמדת המעקב ניתן לקזז לרכז סימולציות במעקב.
תגובות לא נמצא