Dstar Lite הוא יישום C של אלגוריתם D * לייט כפי שמוסבר ב[ קניג, 2002].
ישנם כמה שינויים קלים בקוד זה כדי לשפר את זמן חישוב ומרחק דרך. זוהי פיסת תוכנה פשוטה מאוד וצריכה לקחת מעט מאוד זמן להבין ולשלב.
פקודות:
[Q / Q] - צא
[R / R] - לתכנן מחדש
[/] - Toggle האוטומטי לתכנן מחדש
[ג / C] - נקה (הפעלה מחדש)
לחץ על עכבר שמאלי - להפוך את תא untraversable (עלות -1)
לחיצת עכבר אמצע - להעביר את המטרה לתא
לחיצת עכבר ימני - לעבור מתחילים תא
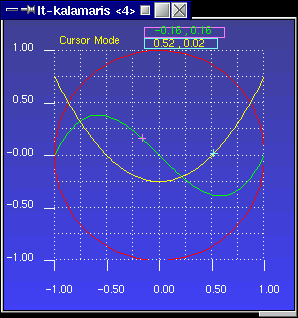
צבעי התא הם כדלקמן:
אדום - untraversable
ירוק - להליכה אבל עם עלות השתנתה
אדום / ירוק עם כיכר סגולה קטנה - התא הוא על openList
צהוב - להתחיל תא
תא מטרה - סגול
שימוש במקור משלך:
הנה תכנית בדיקת עבודה פשוטה שמשתמשת בכיתת Dstar:
#include "Dstar.h"
int main () {
Dstar * dstar = Dstar החדש ();
mypath רשימה;
dstar-> init (0,0,10,5); התחלת // מוגדר (0,0) ומטרה (10,5)
dstar-> updateCell (3,4, -1); תא // להגדיר (3,4) להיות להליכה שאינה
dstar-> updateCell (2,2,42.432); סט // להגדיר (2,2) שעלה 42.432
dstar-> לתכנן מחדש (); // מתכנן נתיב
mypath = dstar-> getPath (); // קבלת נתיב
dstar-> updateStart (10,2); // לעבור המתחילה ועד (10,2)
dstar-> לתכנן מחדש (); // מתכנן נתיב
mypath = dstar-> getPath (); // קבלת נתיב
dstar-> updateGoal (0,1); // מטרת מעבר ל( 0,1)
dstar-> לתכנן מחדש (); // מתכנן נתיב
mypath = dstar-> getPath (); // קבלת נתיב
לחזור 0;
}
צילום מסך תוכנה:
פרטי תוכנה:
תגובות לא נמצא